MotorstyringDa vi havde købt en fjernstyret Nikko Arion og splittet den ad, havde vi to motorer, en til retning og en til drift. Motorerne blev oprindelig styret af hvert deres print, der igen blev styret af radiosignal-modtager-printet. Så vi skulle designe vores egen form for motorstyring, og vi endte med at styre motorerne med relæer. Vores første par forsøg gik ud på at lave en slags brokobling, det virkede fint i teorien og i praksis med BC547/557 transistorer. Men vores motorer trækker en del ampere, hvilket gjorde vi valgte at bruge nogle TIP110/115 transistorer. Desværre fik vi det af uforklarlige årsager aldrig til at virke, og gik hurtigt over til at bruge relæer. Og det viste sig at være en let løsning. Vi bruger to relæer til hver motor, ved at sætte dem i serie, så vi kan styre drift og vende poler for hver motor. Begge motorer kan køre på 6 volt og omkring 0,3-0,4 ampere, så de kan sættes direkte til batteriet. Dog har vi brugt 4 styk effektmodstande på hver 10 Vores motorstyring er simpelt bygget op. For hver motor er der to relæer, en modstand, en transistor og en diode. Ud over det bruges to udgange fra vores kit. Den første del tager sig af at vende polerne. Batteriet på 6 volt sættes til relæets to indgange, og de fire udgange kortsluttes parvist, så vi ender med enten +6v eller -6v ved motoren. På relæet er det henholdsvis ben 8/11 og 6/9 der kortsluttes: 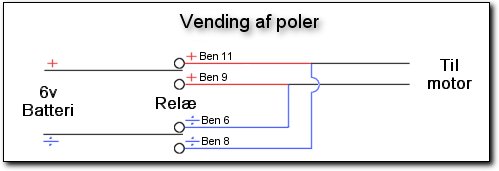 Med styresignalet kan vi nu åbne og lukke for transistoren, der lader de 5 volt passere, og lader relæet "slå over". Vi kan altså nu styre polerne ved at tænde og slukke for den pågældende udgang på vores kit. 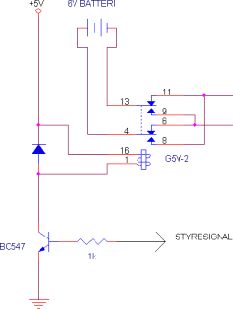 Dioden beskytter mod den spænding der kan løbe tilbage, når relæet slår tilbage. Men det er jo ikke nok til at styre en motor med, vi skal også kunne styre hvorvidt motoren i det hele taget skal have strøm og derved køre. Den anden del af vores motorstyring får input fra det andet relæ, og vi kan på samme måde som før bruge relæet til at slå frem og tilbage. 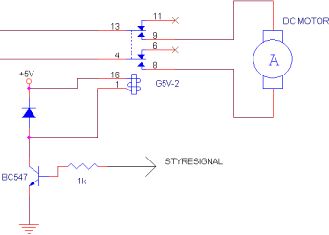 Eneste forskel er at vi nu kun bruger to af de fire udgange på relæet, for at tænde og slukke for motoren. Styklisten til vores motorstyring er således (pr. motor der skal styres): 2 stk. 1000 2 stk. G5V-2 relæer 2 stk. 1n4448 dioder |
|||